|
|

|

|
| e-Pub |
Section: New Results
Ambiant Intelligence And Robotic Systems
Robotic systems : autonomy, cooperation, exploration, robustness, assistance
Local control based platooning
Participants : Jano Yazbeck, François Charpillet, Alexis Scheuer.
We consider decentralized control methods to operate autonomous vehicles at close spacings to form a platoon. We study models inspired by the flocking approach, where each vehicle computes its control from its local perceptions. We investigate different decentralized models in order to provide robust and callable solutions. Open questions concern collision avoidance, stability and multi-platoon navigation.
In order to reduce the tracking error (i.e. the distance between each follower's path and the path of its predecessor), we developed both an innovative approach [68] and a new lateral control law. This lateral control law reduces the tracking error faster than other existing control laws. An article, presenting this control law, its integration with a previously defined secure longitudinal control law [64] and the experimental results obtained with it, has been accepted to 2014 IEEE International Conference on Robotics and Automation.
Map Matching
Participants : François Charpillet, Maan El-Badaoui-El-Najjar.
We addressed an important issue for intelligent transportation system, namely the ability of vehicles to safely and reliably localize themselves within an a priori known road map network. For this purpose, we proposed an approach based on hybrid dynamic bayesian networks enabling to implement in a unified framework two of the most successful families of probabilistic model commonly used for localization: linear Kalman filters and Hidden Markov Models. The combination of these two models enables to manage and manipulate multi-hypotheses and multi-modality of observations characterizing Map Matching problems and it improves integrity approach. Another contribution is a chained-form state space representation of vehicle evolution which permits to deal with non-linearity of the used odometry model. Experimental results, using data from encoders' sensors, a DGPS receiver and an accurate digital roadmap, illustrate the performance of this approach, especially in ambiguous situations [8] .
Adaptation of autonomous vehicle traffic to perturbations
Participants : Mohamed Tlig, Olivier Simonin, Olivier Buffet.
The aim of the European project InTraDE is to propose more efficient ways to handle containers in seaports through the use of IAVs (Intelligent Autonomous Vehicles).
In his PhD thesis, Mohamed Tlig considers the displacements of numerous such IAVs whose routes are a priori planned by a supervisor. However, in such a large and complex system, different unexpected events can arise and degrade the traffic: failure of a vehicle, human mistake while driving, obstacle on roads, local re-planning, and so on.
After working on a simple decentralized strategy to allow two queues of vehicles to share a single lane (presented in 2012, and this year in AATMO-13 [30] ), we have started looking at improving vehicle flows in complete road networks. In particular, we have proposed an approach that allows multiple flows of vehicles to cross an intersection without stopping, allowing to reduce delays as well as energy consumption. Preliminary results have been presented (in French) at RJCIA-13 [38] , and more advanced work is under submission.
The next step is to coordinate the controller agents located in each of the network's intersections so as to create “green waves” that would improve the flows not just locally, but globally.
Living assistant Robot
Participants : François Charpillet, Antoine Bautin, Abdallah Dib, Olivier Simonin.
With LAR (living AssistanT Robot), a PIA projet which started in March, Abdallah Dib joined our team for a PhD. His work is about the development of a low cost navigation system for a robot evolving in an indoor environment. The main issue of his work is to design a Simultaneous Localisation and Mapping algorithm working in a dynamic environment in which people are moving. This is very challenging if we restrict the sensing capabilities of the robot with low cost sensors such as RGB-D camera. An important service we expect the robot to achieve, is realizing similar services as the one we described below: fall detection, activity recognition.
Exploring an unknown environment with a team of mobile robots
Participants : François Charpillet, Olivier Simonin, Antoine Bautin, Nassim Kaldé.
This work has been realized during the ANR Cart-O-matic project. Antoine Bautin has been hired by the Maia team for this project for a PhD. The main objective of the project was to design and build a multi-robot system able to autonomously map an unknown building. This work has been done in the framework of a French robotics contest called Defi CAROTTE organized by the General Delegation for Armaments (DGA) and the French National Research Agency (ANR). The scientific issues of this project deal with Simultaneous Localization And Mapping (SLAM), multi-robot collaboration and object recognition. The Maia Team has been mainly involved in multi-robot collaboration and navigation [13] , [1] , [11] .
Nassim Kaldé, a new PhD student started last year in order to carry out the work done by Antoine Bautin. The new directtion aims at addressing similar problems as the one we addressed in Cart-O-matic project but with dynamical environment, i.e. environment in which people are evolving with robots. An other point that Nassim Kaldé will address is social navigation, which is important for robot and human to coexist in a smart manner.
Features extraction for the control of redundant system with continuous sensori-motor space
Participants : Alain Dutech, Thomas Moinel.
Yann Boniface (CORTEX Team, Loria) is an external collaborator
In collaboration with the CORTEX team and supported by a M2R internship, many questions related to learning the control of a complex (mono)-agent system with a continuous sensori-motor space are explored. For several reasons, the classical framework of Reinforcement Learning is not easily used in that context:
-
the value function to be learned has to be encoded using features that are not known at start,
-
because of the richness of the sensori-motor space, a random exploration scheme is unlikely to find the rewarded states that are needed by the learning process,
-
exploiting what is learned is difficult as one would need to find the maximum of the value function while it is learned.
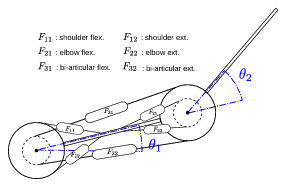
Our work is focused on a planar model of the human arm with 2 joints and 6 muscles (see figure 1 ). Control signals are the activity of the motor-neurons that alter the length of the muscles, and thus the forces applied on the joints. This system is redundant but also highly non linear as many aspects of the model are described by non-linear differential equations (our model is a slight improvement over the one of Li [59] ). The task to learn is to reach different positions from given starting points.
We have studied a developmental learning process with a simple muscle activation pattern. The idea is to start the learning process in an artificially reduced sensori-motor space (using rough perception and motor capacities) and slowly increase the size and complexity of this space when interesting behaviors are learned. Our approach [60] gives results comparable to other developmental techniques and raises several important research questions. Our work showed that we need an abstraction mechanism in order to define or refine the features used in actions but also in perceptions. This is a very difficult challenge that is one of the keys to the understanding (and design) of cognition. There is also a need for stronger generalization capabilities in the function approximation used in the process.
In parallel, we are taking inspiration from the field of neurosciences, and particularly on the coupling between the cortex and the cerebellum in motor control. Models based on the work of Kaladjian [58] should help us understand what control signals are used by the brain apparatus and how the learning of gestures is organized between these two regions. Our long term goal is to design mechanisms for learning features abstraction in the sensori-motor space while being guided by the improvement in behavior performances.
Ambiant intelligence
Personnaly Assisted Living
Participants : François Charpillet, Amandine Dubois, Olivier Simonin.
This action is supported by the Inria IPL Personally Assisted Living (PAL) which gathers 9 Inria teams associated with 6 research partners (technological, medical or social) which work together on three main issue guidelines: mobility assistance, assessing the degree of frailty of the persons, home activities analysis. The MAIA team is currently mainly involved in the 2 later topics, plus fall detection.
-
Evaluation of the degree of frailty of the elderly. As argued in the famous paper of Fried et al [56] the estimation of frailty is highly significant to evaluate the risk of falls, disability, hospitalization and mortality. This issue is considered in Maia Team with different sensing devices: single RGB-D cameras [34] , network of RGB-D cameras, sensing intelligent floor. One simple idea which is currently developed in the team is to determine either the center of mass of a person using one or several kinects, or the center of pressure and footsteps localization using an intelligent floor. The idea is to induce from these simple measures, the walking speed, the length of the steps and the position of the monitored persons.
-
People activity analysis. The follow-up of the activity of elderly people over long period of time can be a good indicator of their well-being, but the evalution of the behavior of a person at home is an open challenge.
To address this issue, we proposed this year a HMM based model capable of following simple activities such as sitting, walking, etc. An evaluation of this model has been conducted within a real smart environment with 26 subjects which were performing any of eight activities (sitting, walking, going up, squatting, lying on a couch, falling, bending and lying down). Seven out of these eight activities were correctly detected among which falling which was detected without false positives [24] .
-
Fall detection. Elderly fall is one of the major health issues affecting elderly people, especially at home. One of the objectives of the PhD work of Amandine Dubois is to design an automatic system to detect fall at home, which in its final version will be made up of a network of RGB-D sensors. A simple and robust method based on the identification and tracking of the center of mass of people evolving in an indoor environment has been developed. Using a simple Hidden Markov Model whose observations are the position of the center of mass, its velocity and the general shape of the body, we can surprisingly monitor the activity of a person with high accuracy and thus detect falls with very good accuracy without false positives [22] , [23] . An experimental study, that is reported here, has been driven in our smart apartment lab. 26 subjects were asked to perform a predefined scenario in which they realized a set of eight postures. 2 hours of video (216 000 frames) were recorded for the evaluation, half of it being used for the training of the model. The system detected the falls without false positives. This result encourages us to use this system in real situation for a better study of its efficiency.
Interconnected intelligent tiles
Participants : Mihai Andries, François Charpillet, Olivier Simonin.
We are also involved in the development of a new innovative sensing device: a Pressure-Sensing Floor with LED lighting making possible to provide a new way for people to interact with their environment. Sensitive or intelligent floors have attracted a lot of attention during the last two decades for different applications going from interaction capture in immersive virtual environments to robotics or human tracking, fall detection or activity recognition. Different technologies have been proposed so far either based on optical fiber sensing, pressure sensing or electrical near field. In the Maia Team, we have developed a more sophisticate approach in which both computation and sensing is distributed within the floor. This floor is made up of interconnected intelligent titles with can communicate with each other, have internal computation power, sense the environment activity (through four weight sensors, an accelerometer and a magnetometer) and can interact with users, robots or other sensor networks either by wireless/wire communication or through visual communication (each tile being equipped with 16 leds).
Several scientific challenges are open to us in the fields of decentralized spatial computing and in designing real application for assisting people suffering from loss of autonomy.
Some of these issues have been addressed this year. Mihai Andries, a PhD student, proposed two contributions demonstrating the relevancy of an intelligent floor such as the one we have developed. First contribution is about controlling a mobile robot through its interactions throughout the floor [10] . The second, least developed is about activity recognition of a person through its physical interaction on the floor. This approach has an important advantage compared to video based activity recognition: the privacy of people is without any doubt guaranteed. Let us mention too, the work of an internship student who developed a gait evaluation algorithm using the variation over time of the center of pressure that is sensed by the floor when one or several person walk over the floor.
Multi-Camera Tracking in Partially Observable Environment
Participants : Arsène Fansi Tchango, Olivier Buffet, Vincent Thomas, Alain Dutech.
Fabien Flacher (Thales THERESIS) is an external collaborator.
In collaboration with Thales ThereSIS - SE&SIM Team (Synthetic Environment & Simulation), we focus on the problem of following the trajectories of several persons with the help of several controllable cameras. This problem is difficult since the set of cameras cannot cover simultaneously the whole environment, since some persons can be hidden by obstacles or by other persons, and since the behavior of each person is governed by internal variables which can only be inferred (such as his motivation or his hunger).
The approach we are working on is based on (1) POMDP formalisms to represent the state of the system (person and their internal states) and possible actions for the cameras, (2) a simulator provided and developed by Thales ThereSIS and (3) particle filtering approaches based on this simulator.
From a theoretical point of view, we are currently investigating how to use a deterministic simulator and to generate new particles in order to keep a good approximation of the posterior distribution.